

“Семь раз отмерь, один раз отрежь”
“За спрос не бьют в нос”
Хочу попросить совета у профессионалов DIY.
Есть идея поставить дома кокпит на активную платформу:

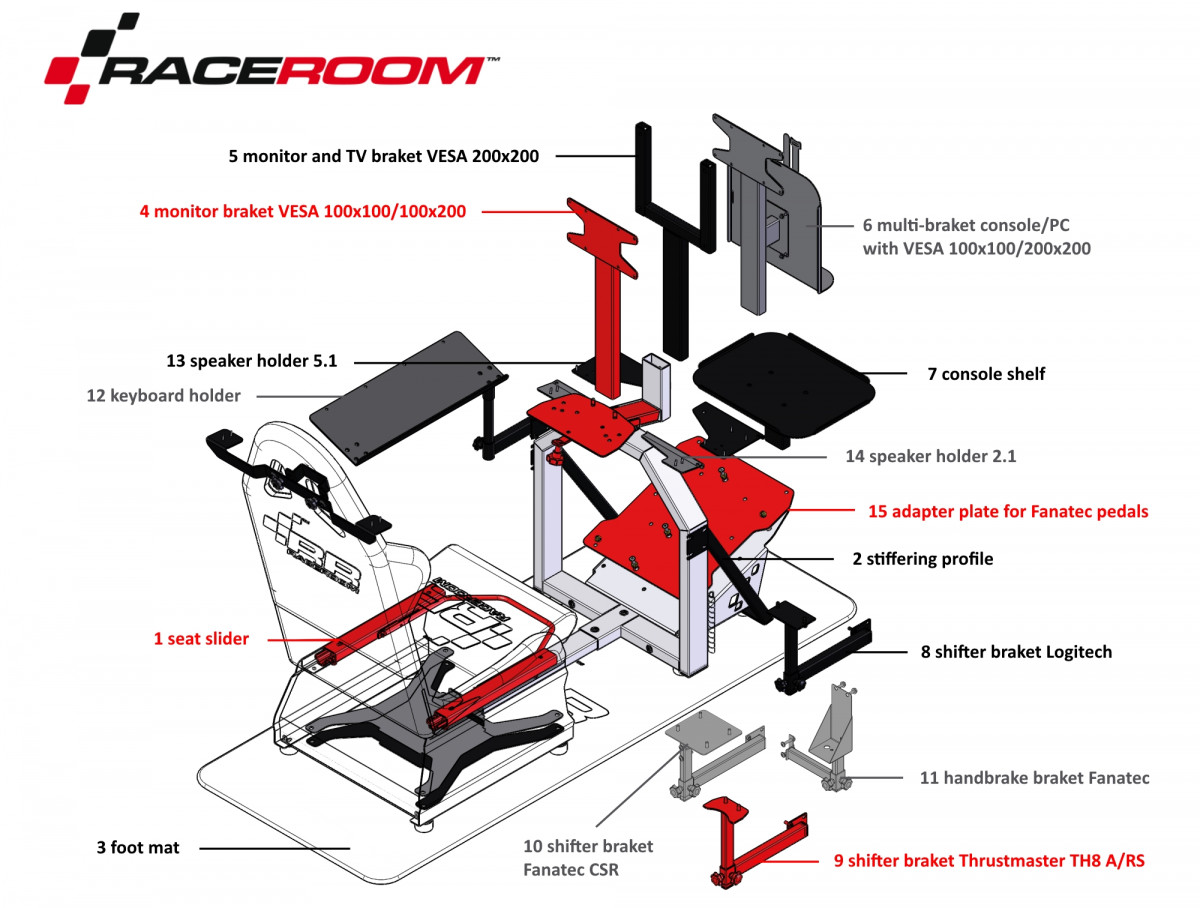
Основа — “MODE2”:

*подключение Arduino к IBT-2 не нарисовано, предполагается типовым.
Особенности:
1) Сделать гальваническую развязку между компьютером и Arduino на базе готового модуля из Китая ADUM4160;
2) Подключить все 5V-устройства к отдельному блоку питания, а не к Arduino;
3) Сделать раздельное питание для электромоторов.
Вопросы:
1) Жизнеспособна ли идея?
2) Не будет ли проблем из-за ADUM4160 или сделать развязку между Arduino и IBT-2?
3) Подходит ли 6127V1A360L.5FS? Если нет, то какие посоветуете потенциометры или готовые датчики Холла? С голым датчиком Холла возиться не хочу.
(Вопросы по потенциометрам):
Скрытый текст
2.1) Нашел на форуме, что номинальное сопротивление должно быть от 1 кОм до 100 кОм. От чего зависит выбор сопротивления?
2.2) К какой погрешности надо стремиться?
2.3) Какой угол должен быть?
2.2) К какой погрешности надо стремиться?
2.3) Какой угол должен быть?
Если что-то упускаю из вида, пожалуйста подскажите или дайте ссылку на хорошие варианты.
4) Подходят ли двигатели с характеристиками 200W/60RPM/24V/15,9 Н/м. Если не подходят, то посоветуйте подходящие (ссылку, если возможно).
Расчетный вес конструкции кокпита (все, что выше шарнира) ~57 кг без учета веса человека.
5) Допустимо ли расположение тяг спереди под педальным блоком?
Сразу отвечаю на вопрос почему готовый кокпит, а не сварной – потому что варить не умею и учится не хочу.
Предполагаю, что в будущем можно будет переделать платформу на 3DOF.





{kind=link}